
내가 풀샥의 시스템에 대해 이해하게 된 최초의 글이다. 물론 관심있는 사람들은 모두 한 번 씩 읽어 봤겠지만 안 읽어 본 사람들을 위해 링크해 드린다. (여기를 클릭하시면 됩니다.)
이 글에 너무나도 잘 정리되어 있어 각 풀샥의 특징을 부연하지 않는다. 다만 내가 이해한 풀샥의 바빙제어 구조의 가장 기본원칙을 기술하고 그 원칙이라는 편견을 갖고 각 프레임의 장단점을 함 디벼보자.
방금 편견이라는 언급을 했듯이 풀샥 잔차에서 일어나는 바빙 문제가 우리가 지금 이해하게 될 문제점으로 인해서만 생긴다고 장담할 수 없다. 난 공학 전공자가 아니고 인문계 전공자로서 기계공학이나 물리학에 대한 지식 엄따. 따라서 다분히 주관적이고 편견 있을 수 있다. 나 보다 잘 아는 분들은 무시해 주시기 바란다. 특히 페달질 하는거에 별 관심없고 오로지 내리막 쏘는게 최고인 사람도 읽을 필요 없겠다.
그럼 나 보다 모르는 분들만 이 글을 읽는다는 전제로 함 시작해 보자.
1. 하드테일
하드테일 잔차다.

태초에 잔차를 맹그실 때 보다 쬐금 발전한 형태를 그대로 유지하고 있다. 처음엔 커다란 앞바퀴에 위에 앉아서 앞바퀴를 직접 돌리는 형태였다. 그래서 앞에 뭐가 걸리기만 하면 무진 잘 넘어졌단다. 그래서 체인을 이용해 뒷바퀴를 돌리고 앞뒤 바퀴 사이에 앉게 되면서 아주 안전해졌다.
이런 건 뒤바퀴에 충격을 흡수하는 장치가 없으니 구조가 간단하고 가볍고(그래도 싼 건 겁나 무겁다) 뒤 삼각형이 고정되어 있으니 바빙이니 뷁잭(brake jack)현상 같은 건 없다.
좀더 편하고 싶어하는 사람들의 욕구와 기술의 발전에 따라 풀샥이 만들어 졌다.
2. 싱글피봇 (Single-pivot)
최초의 풀샥형태를 지니고 있는 모델이다. 일명 싱글피봇.

오른쪽 위의 빨간색 원 안에 있는 피봇을 중심으로 뒤쪽(스윙암)이 상하운동을 하게 된다. 스윙암이 메인삼각형의 한 곳에 의존하여 지탱되고 움직이기 때문에 싱글피봇이다.
그런데 단순한 구조는 좋은데 그 단순함으로 인해 온갖 문제들이 생겨나게 된다. 일명 바빙, 브레이크잭(brak jack), 페달피드백(pedal feed-back 또는 pedal kick-back) 들이다. 그리고 단순하면 가벼워야 할 텐데 부하가 한 곳에 집중되므로 구조적으로 좋지 않고 강도를 보강하고 스윙암도 튼튼하게 하느라 오히려 무겁단다. 헐~
그렇담 왜 바빙이니 웬갖 잡문제가 발생하는 걸까?
싱글피봇은 구조적으로 당연히 피봇을 중심으로 바퀴가 매달려 있는 드랍아웃(drop-out)이 상하로 운동하게 되는데 그렇게 움직일 때 마다 체인링과의 거리가 변하여 체인의 장력이 변하게 된다. 팽팽하게 당겨지는 체인이 크랭크의 회전을 거꾸로 잡아당기는 현상이 발생하게 되는데 이게 페달피드백이다.
페달바빙은 페달을 밟으면 크랭크가 회전하면서 체인을 잡아 당기고, 당겨진 체인이 드랍아웃을 들어올려 샥에 압력을 가하게 되고 바빙이 생기게 된다. 싱글피봇에서는 이 문제를 피봇의 위치를 잘 설정해서 바빙을 최소화 하려한다.

그림에서 피봇의 위치를 잘 보면 2단 체인링 보다 높은 것을 알 수 있다. 체인이 잡아 당겨지는 위치가 피봇 보다 낮게 되면 체인이 당겨질 때 드랍아웃 부분이 아래로 당겨지는 힘을 만들게 되고 샥에 전달되는 압력이 줄어든다. 만약 피봇이 아래쪽에 있고 체인이 높으면 당근 드랍아웃 부분을 들어올리게 되고 샥에 압이 가해져 바빙이 생기게 된다. 보통 오르막이나 평지에서 우리는 대부분 1,2단 체인링을 사용한다. 따라서 1단이나 2단 체인링을 사용할 때는 바빙을 줄일 수 있을 거라는 생각을 할 수 있다.
페달링 시에 드랍아웃을 아래로 잡아 당기는 힘이 바빙을 줄인다는 원리를 잘 이해해 두자. 다른 모든 시스템을 이해하는데 결정적인 역할을 하게된다.
브레이크잭은 코나의 비디오( http://www.konaworld.com/dope.htm )에서 잘 볼 수 있듯이 바퀴가 회전을 시작하면 계속 회전하려는 관성을 갖게 되고 브레이크가 걸리면 계속 운동하려는 관성이 스윙암을 밀어올리고 샥에 압력을 가하게 된다. 이 부분은 험로를 달릴 때 상당히 중요해 지는데 브레이크잭이 발생하여 샥이 압축이 되면 지면의 충격을 흡수할 수가 없어 뒷바퀴는 지면(terrain)을 따라 움직이지 못하고 접지력을 잃게 된다.
싱글피봇 시스템은 근본적으로 이러한 문제점들을 해결 할 수 없다. 그래서 한 때 싱글피봇이 시장에서 완전히 사라질 뻔 했으나 샥의 기술발달로 프로페달 기능 등이 접목됨으로써 많이 보완되게 되었다.
싱글피봇의 장점은 그 단순한 구조로 인해 지면의 충격이 즉시 샥으로 전달되어 충격의 흡수가 빠르고 큰 충격에 대한 대응력이 좋다. 캐논데일 러쉬 설명에 보면 한국지형에 강하다고 되어 있더라..ㅋ
3. 포바링크 (Four-bar linkage)
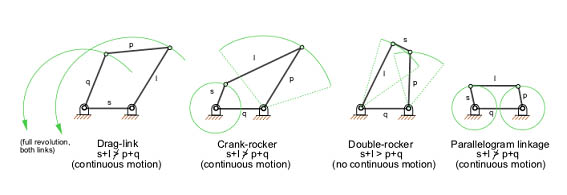
싱글피봇의 여러 문제를 해결하고자 기계공학의 4절 링크장치(Four-bar linkage)를 바이크 프레임 설계에 응용하여 포바링크 풀샥이 탄생하게 되었다.
============참고 (머리 아프면 그냥 넘어가자)
여기서 S = 가장 짧은 링크길이
L = 가장 긴 링크길이
P = 나머지 2개 중 1개의 길이
Q = 마지막 링크길이
그래서 조건이 다음과 같다면
S + L ≤ P + Q
이 링크장치는 Grashof 이고, 적어도 하나의 링크는 고정평면에서 360도 완전회전을 할 수 있다.
참고문헌(Reference)
기구학 / [Robert L. Norton 저] ; 이장무 ; 박영필 ; 배원병 공역.
서울 : 喜重堂 , 1995.
===========여기까지
포바링크 – 일정한 힘을 상이한 회전운동으로 만들어 낼 때 쓰는 기계공학적 기구의 하나란다!??? 먼 소린지 머 하자는 건지 잘 몰라도 저게 자전거에 접목되어 싱글피봇의 문제점을 보완하고 편안하고 빠른 자전거를 만들 수 있게 되었단 거다.
특히 저 두 번째 도형과 풀샥자전거가 매우 유사하단걸 알 수 있다.

도대체 막대기 몇 개 늘었는데 어떻게 다양한 싱글피봇의 문제점들을 많이 극복하게 되었을까 궁금하다.
4. 스페셜라이즈드 FSR (호스트링크 horst-link)
싱글피봇은 기본적으로 힘의 작용방향을 분산하거나 변화시킬 수 없다는 단점이 있다. 포바링크 중 가장 많이 사용되고 검증된 시스템인 스페셜라이즈드의 FSR 구조를 보자. FSR 구조의 핵심은 호스트링크(horst link)에 있는데 개발자인 Leitner Horst의 이름을 따왔고 그 특허를 98년에 스페셜이 사버리는 바람에 특허권이 스페셜라이즈드에 있다. 호스트링크의 핵심은 뒷바퀴 쪽의 링크피봇이 드랍아웃의 앞쪽 아래쪽에 위치한다는 것이다.

뒷바퀴 쪽의 빨간색 원들을 보면(참고로 내 자전거다^^) 바퀴가 회전하는 중심부의 앞쪽 아래 체인스테이에 피봇이 있음을 알 수 있다. 이 별거 아닌 것 같은 링크구조가 엄청난 결과를 가져오는데, 페달링에 의해 체인이 당겨지고, 메인 피봇 보다 낮게 설계된 뒷바퀴의 중심을 앞쪽으로 당기는 힘이 발생하면, 이 힘이 체인스테이를 아래로 미는 힘으로 변화된다. 그러면 뒷쪽 트라이앵글 전체가 아래로 내려가려하고 연결된 바(bar)에 의해 샥에 미치는 압력을 줄여주고 페달을 내리 누르는 힘을 상쇄 시켜준다.
싱글피봇 보다는 복잡해 졌지만 힘을 효과적으로 분산하고 억제하여 브레이크잭 없고, 페달 피드백도 없고, 바빙 억제되었다. 신기하다.
5. faux-bar (non-Horstlink four-bar linkage)
정말 비슷하게 생겨서 구분하기도 힘든 faux-bar를 보자. 스페셜라이즈드 호스트링크 특허를 피해가기 위해 뒤쪽 링크피봇을 드랍아웃 위 싯스테이에 설치했다.

링크가 위 쪽으로 간다고 뭐 나빠질게 있을까? 자세히 체인스테이를 살펴보자. 캐논데일 러쉬와 체인 위로 스윙암이 돌아갔느냐 바로 가느냐만 다르지 메인피봇에서 드랍아웃 까지 한 덩어리인 싱글피봇과 동일하다!!! faux-bar는 샥과 연결되는 싯스테이의 구조만 다르지 싱글피봇과 다를게 없어 싱글피봇의 문제점을 그대로 가진다. 헐~
물론 싱글피봇 보다 힘을 지탱하고 충격을 분산하기에 유리한 구조다. 실제로 뒷바퀴가 움직이는 거리와 샥이 움직이는 거리(샥레이쇼(shock ratio))를 조절하여 잔 충격에 잘 반응하고 큰 충격도 잘 대응할 수 있도록 설계된다. 하지만 여전히 싱글피봇 처럼 바빙제어에 있어 발달된 샥의 기능에 많이 의존하게 될 것이다.
첨언하자면, 메인피봇의 위치가 적절하고 상부 링크가 잘 설계된 faux-bar는 호스트링크와 유사한 성능을 낸다고 한다.
6. 트렉 ABP
faux-bar 구조를 택하고 있던 트렉은 풀샥 성능이 떨어진다는 비판을 받아왔단다. 그래서 DW-link를 개발한 Dave Weagle에게서 2006년 개발된 split-pivot이란 기술을 사와서 ABP 풀샥을 내놓았다. 내가 풀샥에 대한 이해가 없었을 때 내가 무지 관심 갖고 지를까 말까 망설였던 제품이다.
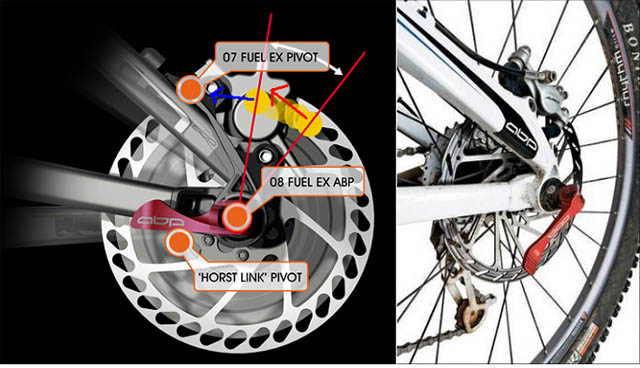
오옷~ 뭔가 다르다. 혁신적이다. 리어액슬과 피봇이 그냥 한 몸이 되어버렸다. 07년식은 피봇이 faux-bar 방식이고 브레이크의 작용점이 후방으로 30도 가량 기울어 있어 브레이크잭을 낳는 전형으로 보인다. 즉 브레이크가 회전관성을 가지고 돌고 있는 바퀴를 잡으려 하면 그 작용점을 그대로 밀어올리는 힘을 발생시키고 싯스테이를 밀어올려 샥을 누르게 된다(빨간 화살표).
08모델은 액슬 피봇 통합으로 인해 브레이크의 작용점이 변화되어 전방으로 이동되었고, 그로인해 힘의 작용방향이 개선되고(파란색 화살표) 싯스테이와 브레이크가 상부링크와 체인스테이로 부터 독립되어 브레이크잭 현상이 줄었을 것으로 추측된다. 또 피봇의 위치가 약간 낮아져 바빙이 개선되었을지도 모르지만 샥의 프로페달 기능에 여전히 의존해야 할 것이다. ABP는 기본적인 구조가 faux-bar 방식과 유사하여 싱글피봇의 문제를 온전히 극복하지 못하고 있다.
7. VPP, DW-link, 마에스트로 등
호스트링크(horst link)를 쓰지 않고 풀샥의 문제점을 개선하려는 시도에 의해 개발되었다고 생각한다. 이 들의 특징은 모두 뒷바퀴를 잡고 있는 삼각형 구조가 고정되어 있고 이 삼각형을 프레임에 링크로 연결한 구조라는 공통점을 가지고 있다. 잘 보면 링크구조가 위 3항에 있는 4절링크장치 도식의 4번째 그림과 비슷하다.
뒤 삼각형이 두 개의 링크바에 의해 움직이므로, 고정된 하나의 중심점인 메인피봇이 없고 두 개의 링크(짧은 막대기)가 어떻게 움직이는가에 따라서 변화하게 된다. 그래서 Virtual Pivot Point? 이름 멋지다.
산타크루즈 블러 프레임이다.

살펴보면 뒤 쪽 닫힌 삼각형 구조가 있고 프레임에 두 개의 짧은 막대기(링크)로 연결되어 있다.
아이비스 모조(DW-link)도 마찬가지로 뒤삼각형이 있고 위 아래 두 개의 링크로 프레임에 연결되어 있다. 자이언트의 마에스트로도 마찬가지다. 이들의 차이점은 샥이 작동할 때 저 두 개의 짧은 막대기가 서로 같은 방향으로 회전하느냐 반대로 회전하느냐의 차이다. VPP진영에서는 링크가 서로 반대로 회전해야 힘을 상쇄하여 제대로 바빙을 억제할 수 있다고 주장하고 있다.
모두 양호한 성능을 낸다고 생각되지만 블러(VPP)는 후방으로 바퀴가 움직이도록 설계되어 있어 체인의 장력이 변하므로 패달피드백 현상이 있다. 이 부분으로 인해 산타크루즈 측에서 08년 모델부터 하단링크의 길이를 줄여 문제점을 개선한 것으로 보인다.
(참고: http://www.santacruzbicycles.com/news/index.php?news=1&NewsID=0046 )
그럼 어떻게 바빙을 억제하는지 머리를 굴려 보자.

페달을 굴려 체인이 잡아 당겨지면 하단 피봇 보다 낮게 설계된 드랍아웃이 당겨지면서 하단링크를 아래로 미는 힘으로 변한다. 뒷삼각형을 아래로 당기는 힘이 샥의 부하를 상쇄하고 바빙을 억제한다. 호스트링크 보다 좀 더 복잡해진 듯 하다.
8. Felt의 Redemption system
이퀴링크(Equilink)를 채택했다는 펠트의 리뎀션시스템이다. 무지 복잡해 보인다. 엔지니어 이건찬선배가 워낙 좋은 시스템 중에 하나가 아닐까 하는 정도로 접수하고 이해하기를 미루고 있는 시스템이다. 그래서 내가 눈이 빠져라 들여다 봤다.^^

링크피봇이 5곳(빨간 원)이나 되고 개뼉다구 처럼 생긴 빨간막대기 까지 하면 도대체 정신이 없어 최첨단 신기술 울트라 캡숑 시스템이라고 생각될 듯 하다.
하지만 가만히 보일 때 까지 노려보다 보면 이건 각종 특허를 피해가기 위한 변종에 불과하다는 걸 보게된다. 저 노란색 화살표를 이어서 뒤 삼각형을 닫힌 형태로 만들면, 고정된 삼각형이 위아래 두 개의 링크바로 프레임에 연결된 DW-link나 마에스트로가 된다. 샥이 움직이면 위아래 링크가 모두 동일한 방향으로 회전하는 DW-link 시스템인 것이다.
그런데 특허를 피해가기 위해서 노란색 부분을 없애고 저렇게 삼각형을 열게되면 드랍아웃 부위의 피봇이 필요하게 되고, 페달링이 가해지면 체인스테이와 싯스테이가 서로 반대 방향으로 벌어지게 되어 바빙머신이 되어 버린다. 그래서 상부링크와 하부링크를 연결하여 체인스테이가 아래로 눌리는 힘을 위 링크로 이어 줄 수 밖에 없게 된 것이다. 저 개뼉다구가 링크 수 만 늘려 놓은 꼴이다. 물론 운동 성능은 나쁘지 않을 것 같다. 하지만 쓸데없이 복잡하다.
참고 : 펠트의 엔지니어 이퀴링크 설명 동영상
http://video.i7i.us/video/QrFXtKD9V08/THE-FELT-VIRTUE-MOUNTAIN-BIKE.html
9. 록키마운틴 ETSX (멀티링크)
내 머리로 어떤 성능을 보일지 확신하기 어려운 대표적인 프레임이다. 솔직히 잘 모르겠다. 거대한 메뚜기 같이 생긴 녀석이 비싸긴 또 디게 비싸다. 싱글피봇과 포바링크의 중간 정도의 특성을 보이지 않을까 싶다. 바빙 대응력은 떨어질 것 같다. 차로 보면 운동성능 조금 떨어지면서 가격은 비싸고 겉모습은 그럴싸해 보이는 렉서스를 보는 느낌이랄까..

ETSX의 최대 장점은 뒷 바퀴 휠트레블을 3.5~5인치 까지(연식에 따라 다를 수 있음) 조정할 수 있다는 점이다. 물론 잠깐 멈춰 서서 변환작업을 해야 하지만 큐알을 풀고 구멍을 조정하여 간단하게 3단계로 조정이 가능하다. 따라서 한 대로 XC부터 올마에 까지 여러 장르를 느껴 볼 수 있다는게 매력적이다.
10. 결론
여기 언급된 시스템 말고도 수 많은 방식들이 존재하고 있다. 그 많은 풀샥 중에 뭐가 제일 좋을지 고민 만을 반복하다 오히려 뭐가 뭔지 더 헛갈려서 자전거 선택을 포기하고 떡실신 나자빠지지는 말자. 뭐가 됐든 자전거를 탄다는 사실이 중요하다. 특히 올마운틴 이상급은 아무거나 몸에 맞는 거 타자.
당근 내가 가장 좋다고 생각하는 시스템에 대한 나의 견해가 있다. 감 잡았을 듯 하지만 난 FSR을 선호한다. 가장 심플하고 효율적인 포바링크로 싱글피봇의 문제점을 극복하고 있다. DW-link도 좋을 듯하다. 저렴한 모델부터 최고가 명품까지 FSR의 장점을 잘 구현해낸 프레임 들이 엄청 많다. 이들 중에서 선택하면 후회는 하지 않을 듯 하다.
혹시 잘 모르겠다면 한 가지만 기억하자. 뒷바퀴가 회전하는 중심에서 앞쪽 아래쪽에 링크피봇이 있는 것을 선택하자. 필시 성능이 젬병은 아닐 것이다.
햐~~
이해가 쏙쏙되고 좋습니다.
그림도 있고.ㅋ
펠트 이퀴링크의 최대 장점은…
1. 비싼 리어샥이 필요없음.
i-to-i 사이즈만 맞으면 저렴한 거 사서 꽂아도 바빙이 없다는 거
프로페달 기능 이런 거 필요없다는 거죠.
2. 라이딩 중 리어샥이 터졌을 때 수리하러 자전거를 타고 가는데 별 무리 없는다는 겁니다.
ETSX 의 가장 큰 장점은 트레블 변환이 된다는 겁니다.. ^^;
오~ 그렇군요. 대리님. 상당히 독특하고 매력적인 장점을 빼먹었네요. 추가했습니다. 휠트레블이 최근 모델은 좀 더 커졌는지 모르겠네요.
방대하고 어렵다고 느끼던 내용을 정리하셨군요. 잘 보았습니다.
근데 자기 잔차 너무 자랑하는 거 아니감?
물론 06년식 스텀피fsr을 타 본 제 경험으론 충분히 이해할 수 있지만… ㅋㅋ
08년식 써스펜션 구조에서, horst-link pivot을 유지하지만, 프레임/스윙암 접속부가 기존 cantilever/strut 방식에서 rocker-arm 방식으로 크게 변했습니다.
언제 강창현님 잔차를 타 봐야겠군요. 스페셜에서 썰푸는 대로 ‘fully active’에다 ‘fully independent’한 지…
에~ 그니까.. 자전거를 한 번 바꿔 타 보자는 말씀이시죠? 그냥 쉽게 말해도 되는데..ㅋ
언능 공부하고 와야게따~ 후다닭…
‘fully active에다 ‘fully independent’는 08년 스페셜의 홈피에서 써스펜션 구조를 설명한 말입니다.
현재는 찾지 못하겠군요.
ㅇ HOW IT WORKS (스페셜라이즈드 08년 홈피 발췌)
– Fully Active
FSR is a fully active design, which means it responds freely to ‘bumps and dips’, keeping the tire in contact with the terrain and providing the ‘traction and control’ required to change speed and direction more effectively. Being fully active boosts riding efficiency by maintaining momentum as much as possible through rough terrain. Soreness and fatigue are minimized as the bike isolates the rider from bump forces to the greatest degree possible.
– Fully Independent
FSR works with you, not against you. Careful ‘placement of pivots’ makes the FSR system almost completely neutral, free to compress and rebound, and virtually unaffected by chain or brake forces. It provides better control by isolating brake forces, even under hard decelerations. Rear suspension motion has functionally no effect on pedal stroke, eliminating pedal ‘kick back’ and ‘drop away’ as the suspension absorbs the bumps.
FSR suspension yields maximum comfort, control, and efficiency by enabling engineers to design a system that is independent of chain and brake forces so that it is always fully active in rough terrain. The new Stumpjumper FSR is a perfect example of FSR in action.
A key element of the FSR design is its four pivot locations, which gives Specialized engineers precise control over suspension telemetry, i.e. the path that the rear wheel follows through suspension travel.
그리고 ‘active와 Independent’란 말은 잔차의 써스펜션 구조/성능를 기술하는 일반적인 용어인 것 같습니다.
independent라는 말은 자동차 쪽에서는 흔히 보는 말인데요. independent suspension, 독립현가장치라고 표현하죠. 바퀴가 반대쪽과 연결되지 않고 한 쪽 바퀴씩 따로 움직이며 충격을 흡수하는 구조죠.
자전거에서 이 말이 나오니 먼소린지 모르겠는데요. 아마도 메인삼각형에서 뒤 삼각형이 완전히 독립적으로 움직인다는 뜻일까요?
fully active는 체인장력이나 브레이크잭의 영향없이 서스펜션이 어떤 상황에서도 지면의 충격을 흡수할 수 있도록 잘 작동한다는 의미로 생각됩니다.
좀 더 알아보니 제가 잘못된 용어를 사용했다는걸 알게됐네요.
스윙링크를 일명 faux-bar라고 소개하고 동일한 것으로 용어를 사용했는데 아니네요.ㅜㅜ
faux-bar는 호스트링크를 사용하지 않는 포바링크를 칭하는 용어구요.
스윙링크는 호스트링크 사용여부와 관계없이 프레임 구조의 명칭중 하나입니다. 구조가 동일하면 둘 다 스윙링크라고 부를 수 있네요.
수정하겠습니다.
스페셜라이즈드 측에서 말하는 independent suspension의 의미를 알겠네요. 바이크매거진의 언급에 따르면..
=====
FSR 리어 서스펜션 구조
풀서스펜션 시스템 개발에 특히나 많은 투자를 한 스페셜라이즈드는 FSR이란 리어 서스펜션 구조를 15년 넘게 발전시켜 왔다.
FSR의 목적은 리어 서스펜션, 브레이크, 페달링, 이 세가지의 기능이 모두 서로에게 영향을 주지 않고 최상의 성능을 발휘하는 것이다.
이것은 놀랍게도 좋은 결과를 만들어내어 어떤 상황에서도 뒤바퀴 접지력을 유지하고, 페달링을 방해하지 않으며 브레이크 성능에도 영향을 주지 않게 되었다. 실제 스페셜라이즈드 FSR 모델을 타게 되면 이 능력을 쉽게 체험할 수 있을 것이다.
[출처] (주)세파스 SPECIALIZED – http://cephassp.co.kr/bbs/board.php?bo_table=press&wr_id=27
======
서스펜션의 움직임과 페달링, 브레이크가 각각의 작동에 서로 영향을 받지않고 독립적으로 작동한다는 의미네요.